




コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
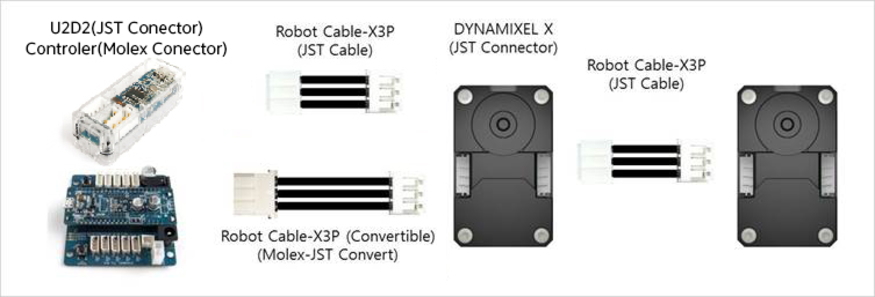
【様々なケーブル接続方法】

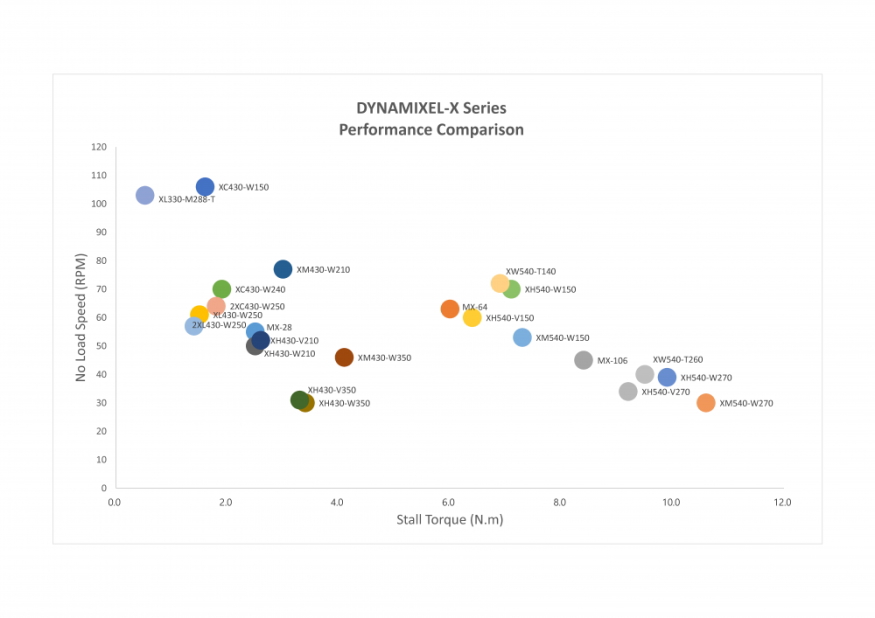
【性能比較】
【注意】
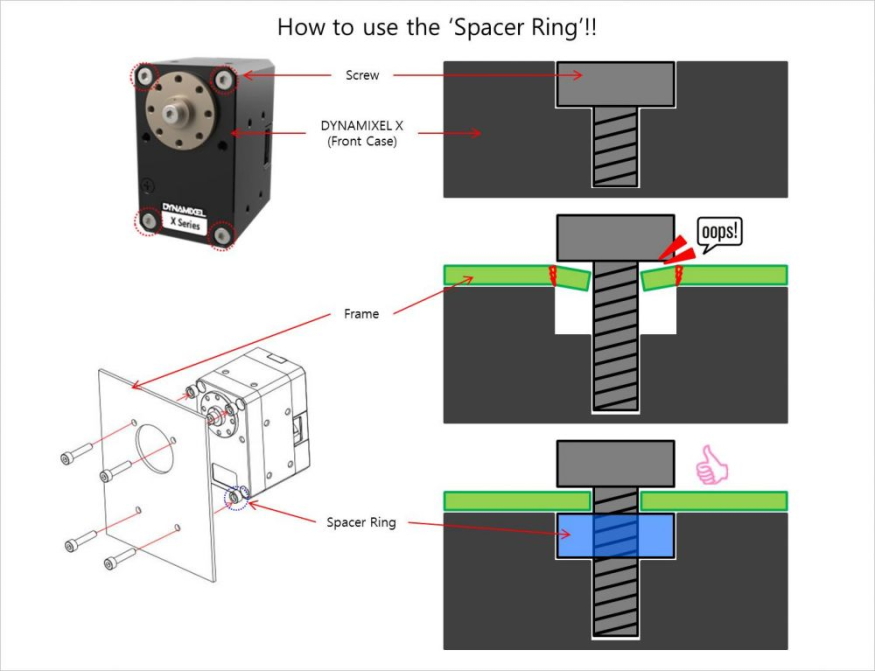
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" data-fancybox="gallery" data-alt="67682317_8" data-standard="
RS485(4ピン)モデル, 12V仕様, コアレスモータ搭載, 金属ギヤ
【特徴】
DYNAMIXELは、DCモーター+コントローラー+ドライバー+センサー+減速機+ネットワークを1つのDCサーボモジュールに完全統合したロボット専用スマートアクチュエーターです。DYNAMIXEL XLシリーズは、非接触磁気エンコーダーと中空バックケースアセンブリ構造により、360度の制御モードを可能にする新機能を採用しています。XLシリーズはXM430、XH430と同様の機構構造を持ち、それぞれのモデルと互換性があります。
1. さまざまな動作モード(速度制御、位置制御、拡張位置制御、PWM制御)
2. スムーズな動作計画を実現するプロファイル制御
3. 中空ケースによりケーブルストレスを最小限に抑える (3方向配線)
4. ケースに直接ネジを取り付ける(ナットインサートなし)
5. 電流低減による省エネ
【パッケージ内容】
・XH430-W350×1
・HN12-N101×1
・Teflon Washer (for Horn Assembly)×1
・Robot Cable-X4P 180mm×1
・Robot Cable-X4P(Convertible) 180mm×1
・Wrench Bolt (WB M2.5*4)×16
・Wrench Bolt (WB M2.5*6)×1
・Wrench Bolt (WB M2*3)×10
・Spacer Ring×8
【対応製品】
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" data-swap="
RS485(4ピン)モデル, 12V仕様, コアレスモータ搭載, 金属ギヤ
【特徴】
DYNAMIXELは、DCモーター+コントローラー+ドライバー+センサー+減速機+ネットワークを1つのDCサーボモジュールに完全統合したロボット専用スマートアクチュエーターです。DYNAMIXEL XLシリーズは、非接触磁気エンコーダーと中空バックケースアセンブリ構造により、360度の制御モードを可能にする新機能を採用しています。XLシリーズはXM430、XH430と同様の機構構造を持ち、それぞれのモデルと互換性があります。
1. さまざまな動作モード(速度制御、位置制御、拡張位置制御、PWM制御)
2. スムーズな動作計画を実現するプロファイル制御
3. 中空ケースによりケーブルストレスを最小限に抑える (3方向配線)
4. ケースに直接ネジを取り付ける(ナットインサートなし)
5. 電流低減による省エネ
【パッケージ内容】
・XH430-W350×1
・HN12-N101×1
・Teflon Washer (for Horn Assembly)×1
・Robot Cable-X4P 180mm×1
・Robot Cable-X4P(Convertible) 180mm×1
・Wrench Bolt (WB M2.5*4)×16
・Wrench Bolt (WB M2.5*6)×1
・Wrench Bolt (WB M2*3)×10
・Spacer Ring×8
【対応製品】
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
">
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" main-photo-url="
RS485(4ピン)モデル, 12V仕様, コアレスモータ搭載, 金属ギヤ
【特徴】
DYNAMIXELは、DCモーター+コントローラー+ドライバー+センサー+減速機+ネットワークを1つのDCサーボモジュールに完全統合したロボット専用スマートアクチュエーターです。DYNAMIXEL XLシリーズは、非接触磁気エンコーダーと中空バックケースアセンブリ構造により、360度の制御モードを可能にする新機能を採用しています。XLシリーズはXM430、XH430と同様の機構構造を持ち、それぞれのモデルと互換性があります。
1. さまざまな動作モード(速度制御、位置制御、拡張位置制御、PWM制御)
2. スムーズな動作計画を実現するプロファイル制御
3. 中空ケースによりケーブルストレスを最小限に抑える (3方向配線)
4. ケースに直接ネジを取り付ける(ナットインサートなし)
5. 電流低減による省エネ
【パッケージ内容】
・XH430-W350×1
・HN12-N101×1
・Teflon Washer (for Horn Assembly)×1
・Robot Cable-X4P 180mm×1
・Robot Cable-X4P(Convertible) 180mm×1
・Wrench Bolt (WB M2.5*4)×16
・Wrench Bolt (WB M2.5*6)×1
・Wrench Bolt (WB M2*3)×10
・Spacer Ring×8
【対応製品】
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" zoom-photo-url="
RS485(4ピン)モデル, 12V仕様, コアレスモータ搭載, 金属ギヤ
【特徴】
DYNAMIXELは、DCモーター+コントローラー+ドライバー+センサー+減速機+ネットワークを1つのDCサーボモジュールに完全統合したロボット専用スマートアクチュエーターです。DYNAMIXEL XLシリーズは、非接触磁気エンコーダーと中空バックケースアセンブリ構造により、360度の制御モードを可能にする新機能を採用しています。XLシリーズはXM430、XH430と同様の機構構造を持ち、それぞれのモデルと互換性があります。
1. さまざまな動作モード(速度制御、位置制御、拡張位置制御、PWM制御)
2. スムーズな動作計画を実現するプロファイル制御
3. 中空ケースによりケーブルストレスを最小限に抑える (3方向配線)
4. ケースに直接ネジを取り付ける(ナットインサートなし)
5. 電流低減による省エネ
【パッケージ内容】
・XH430-W350×1
・HN12-N101×1
・Teflon Washer (for Horn Assembly)×1
・Robot Cable-X4P 180mm×1
・Robot Cable-X4P(Convertible) 180mm×1
・Wrench Bolt (WB M2.5*4)×16
・Wrench Bolt (WB M2.5*6)×1
・Wrench Bolt (WB M2*3)×10
・Spacer Ring×8
【対応製品】
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" title="67682317_8" alt="67682317_8" object-item-width="512" object-item-height="407" style="width: 115.656px;">
DYNAMIXEL XH430-W350-R
 5
(46件)
5
(46件)
 タイムセール
タイムセール
999円以上お買上げで代引き手数料無料


商品詳細情報
| 管理番号 | 新品 :67682317 | 発売日 | 2024/06/18 | 定価 | 41,492円 | 型番 | 67682317 | ||
|---|---|---|---|---|---|---|---|---|---|
| カテゴリ | |||||||||
DYNAMIXEL XH430-W350-R
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" rel="lightbox" onclick="dataLayer.push({'event': 'action_click','eventCategory':'popup media link','eventAction':'cb','eventLabel':this.href})" style="display:block;width:calc(100%/2);float:left;">
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" alt="DYNAMIXEL XH430-W350-R" src="
RS485(4ピン)モデル, 12V仕様, コアレスモータ搭載, 金属ギヤ
【特徴】
DYNAMIXELは、DCモーター+コントローラー+ドライバー+センサー+減速機+ネットワークを1つのDCサーボモジュールに完全統合したロボット専用スマートアクチュエーターです。DYNAMIXEL XLシリーズは、非接触磁気エンコーダーと中空バックケースアセンブリ構造により、360度の制御モードを可能にする新機能を採用しています。XLシリーズはXM430、XH430と同様の機構構造を持ち、それぞれのモデルと互換性があります。
1. さまざまな動作モード(速度制御、位置制御、拡張位置制御、PWM制御)
2. スムーズな動作計画を実現するプロファイル制御
3. 中空ケースによりケーブルストレスを最小限に抑える (3方向配線)
4. ケースに直接ネジを取り付ける(ナットインサートなし)
5. 電流低減による省エネ
【パッケージ内容】
・XH430-W350×1
・HN12-N101×1
・Teflon Washer (for Horn Assembly)×1
・Robot Cable-X4P 180mm×1
・Robot Cable-X4P(Convertible) 180mm×1
・Wrench Bolt (WB M2.5*4)×16
・Wrench Bolt (WB M2.5*6)×1
・Wrench Bolt (WB M2*3)×10
・Spacer Ring×8
【対応製品】
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" style="margin:0; max-width:95%; width:100%" loading="lazy">
ラジコンの製品





わんだらーの製品










